



Đồng tốc xy lanh thủy lực được sử dụng khá phố biến trong các cơ cấu đòi hỏi phân bổ không đều lực (hoặc mô men) trên một khoảng cánh lớn. Thủy lực An Huy nêu ra các giải pháp giải quyết vấn đề chính của bài toán đồng tốc xi lanh thủy lực đó là chia lưu lượng sao cho vào các xy lanh là bằng nhau, từ đó tốc độ làm việc của các xy lanh là bằng nhau (xy lanh đã đồng tốc).
Giải pháp 1- Dùng van chia lưu lượng
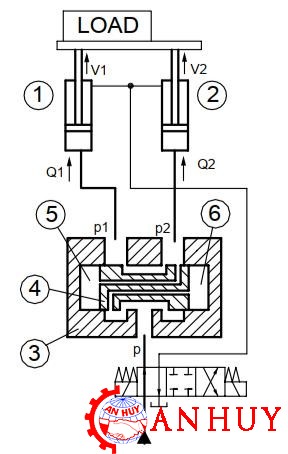
Bộ chia được sử dụng để chia dòng chảy từ một nguồn thành hai dòng chảy tỉ lệ bằng nhau cho hai cơ cấu chấp hành – Fig. 2.25.
Bộ chia lưu lượng (3) bao gồm con trượt (4), nó tự động thay đổi khe hở để bù trừ cho sự chênh lệch áp suất P1 và P2. Hai áp suất này hoạt động ở 2 phía đối diện nhau của con trượt (4) thông qua lỗ khoan trong con trượt, bằng cách này sự tăng áp ở P1 sẽ làm giảm khe hở phía P2 và làm giảm lưu lượng Q2, vì vậy khi tốc của xy lanh 1 giảm xuống do áp suất P1 tăng lên thì con trượt cũng điều chỉnh sao cho tốc độ của xy lanh 2 giảm xuống
Do đó, áp suất P ở cửa vào của van bằng áp suất lớn nhất ở cửa ra cộng với tổn thất áp suất qua khe hở. Điều này có nghĩa là tổn thất áp suất có thể rất lớn, và phát sinh ra nhiệt dư thừa
Độ chính xác của bộ van chia lưu lượng khoảng 10%.
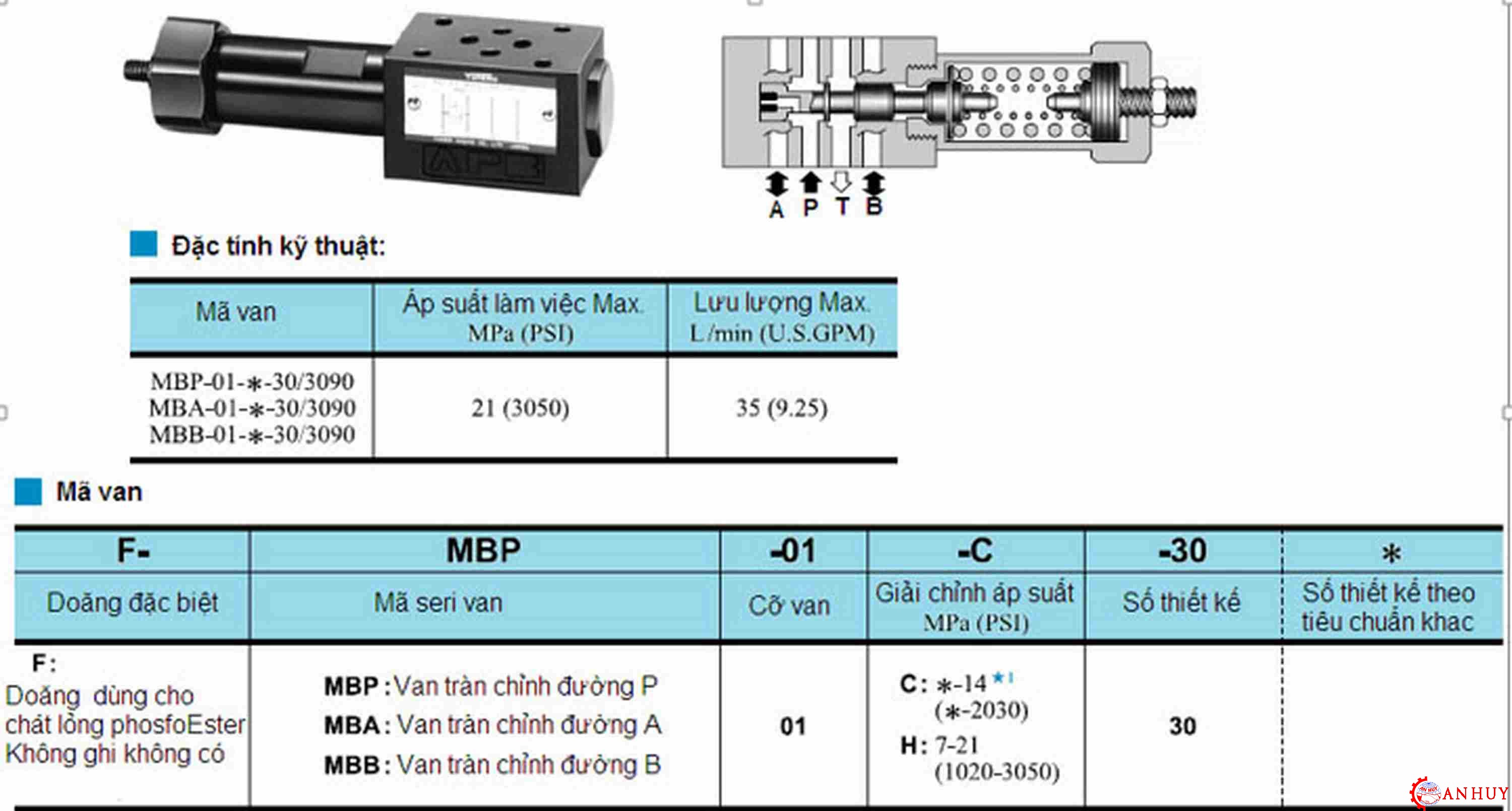
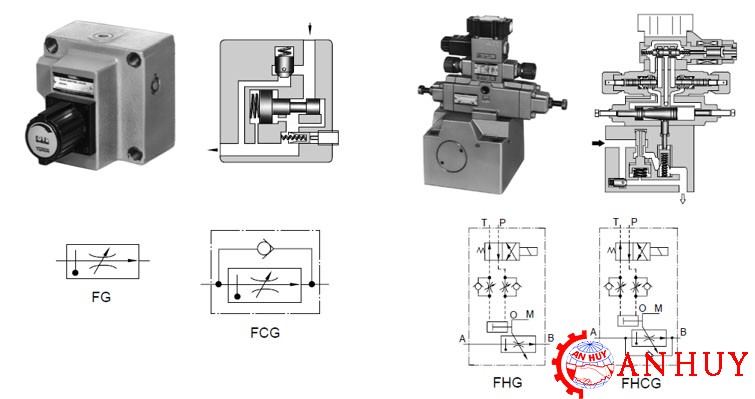
Giải pháp 2 – van điều khiển lưu lượng bù áp suất ( van tiết lưu)
Sự điều chỉnh độc lập của các van điều khiển lưu lượng bù áp cho phép thiết đặt bất kỳ tốc độ đồng bộ nào. Sự điều chỉnh này đòi hỏi sự tinh chỉnh bằng tay của 2 van cho mỗi tốc độ cụ thể
Độ chính xác đồng bộ vào khoảng 5%
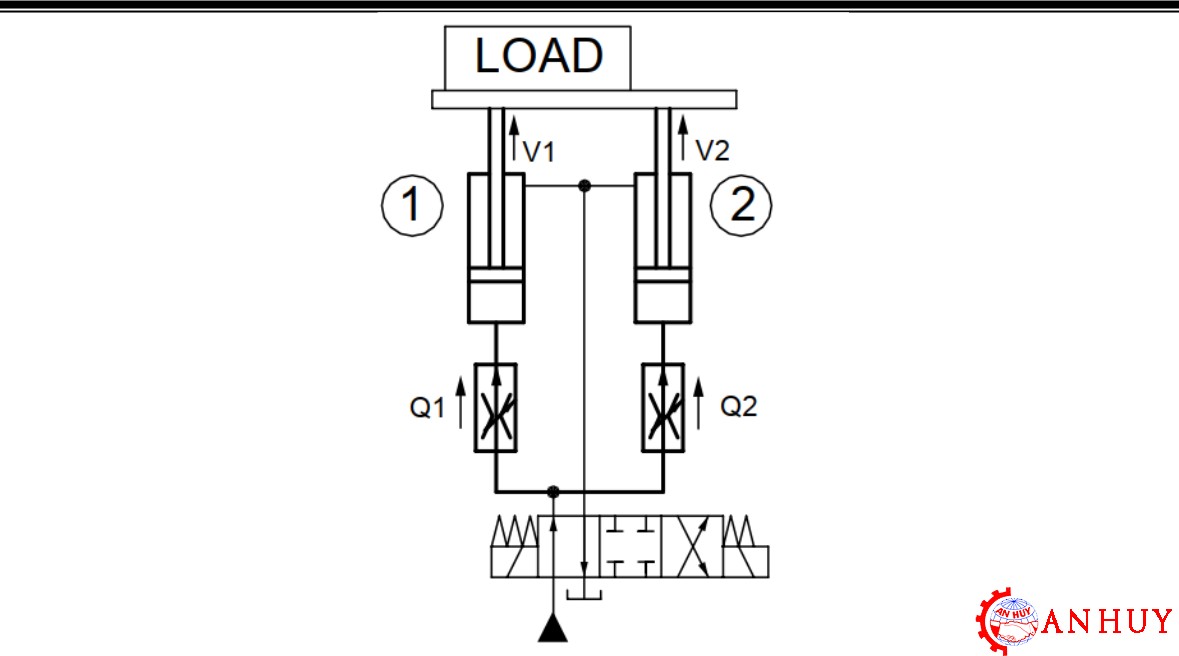
Fig. 2.26. Hydraulic circuit with flow control valves
Giải pháp 3 – nhiều bơm kết hợp
Trong phương pháp này chúng ta sử dụng 2 bơm đồng trục.Sự rò rỉ bên trong thay đổi lưu lượng bơm khi áp suất thay đổi. Do đó, sự chính xác về điều khiển tốc độ khoảng 5%. Hai bơm được bố trí không đáp ứng được sự linh hoạt để thay tốc độ bơm - trừ khi tốc độ dẫn động bơm có thể thay đổi.
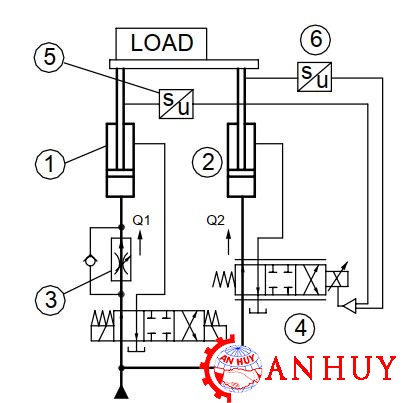
Fig. 2.27. Two-pump arrangement
Xem thêm Bơm thủy lực bánh răng Parker
Giải pháp 4 – xy lanh 2 cần nối tiếp nhau
Ưu điểm chính của việc sử dụng các xy lanh nối tiếp nhau là hiệu suất thể tích cao. Tổng tổn thất bên trong trong tất cả các xy lanh gần như bằng 0. Điều này có nghĩa rằng, với bất kỳ chuyển động biết trước của xy lanh (1), có một thể tích chất lỏng biết trước di chuyển sang xy lanh (2) bất kể tải trên mỗi xy lanh.
Do đó, độ chính xác của điều khiển tốc độ này khoảng 1%.
Nhược điểm chính – áp suất trong xy lanh thứ nhất sẽ tăng gấp đôi so với yêu cầu của tải. sự bố trí này cũng yêu cầu thêm không gian để chứa 2 cần xy lanh.
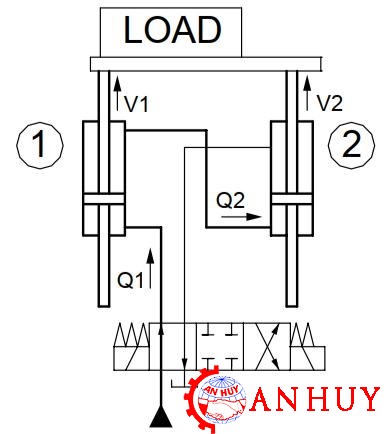
Fig. 2.28. Hydraulic circuit with double-rod cylinders in series
Giải pháp 5 – xy lanh một cần nối tiếp nhau
Hệ thống bao gồm hai xy lanh nối tiếp nhau, với đường kính lỗ khoan và đường kính cần có kích thước sao cho diện tích khoang có cần xy lanh (1) bằng diên tích piston (khoang không cần ) của xy lanh (2)
Rất khó để sản xuất các xy lanh cho sự lắp đặt này với độ chính xác cao.
Do đó, độ chính xác của điều khiển tốc độ khoảng 2%.
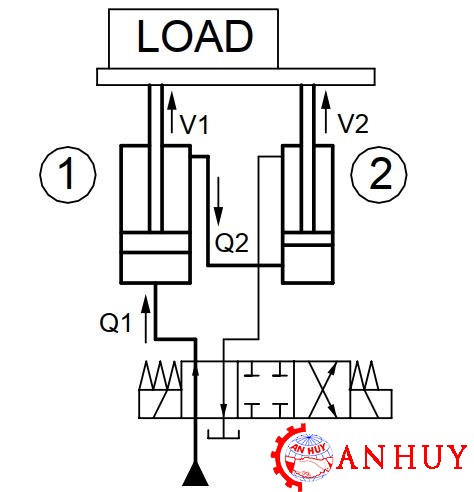
Fig. 2.29. Hydraulic circuit with single-rod cylinders in series
Giải pháp 6. Xy lanh chính
Được chỉ trên trên hình 2.30, Xy lanh chính (3) cung cấp lưu lượng bằng nhau cho các xy lanh (1) và (2) độc lập với vị trí của tải
Độ chính xác của đồng tốc khoảng 1%
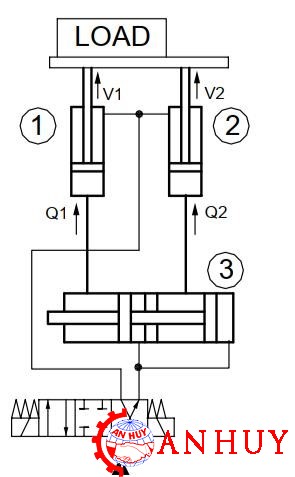
Fig. 2.30. Hydraulic circuit with master cylinder
Xem thêm Bơm cánh gạt Yuken
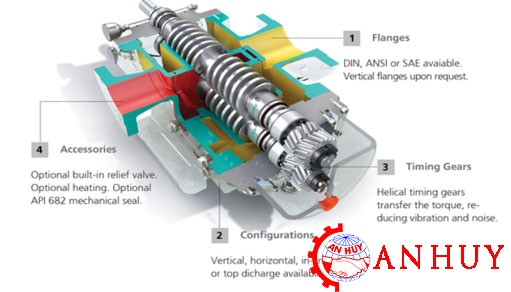
Giải pháp 7 - bộ chia lưu lượng quay ( bánh răng)
Một phương pháp khác để phân chia một dòng vào thành 2 dòng bằng nhau là sử dụng bộ choa dòng quay ( thường là bộ chia bánh răng). Nó bao gồm hai động cơ thủy có lưu lượng riêng bằng nhau, được nối cứng với nhau bằng một trục – hình 2.53. Bởi vì các động cơ quay cùng với một tốc độ nên lưu lượng ra là bằng nhau. Tổn thất áp suất ở môĩ động cơ là rất nhỏ bởi vì không có năng lượng nào được cung cấp cho các trục, như hoạt động bình thường của động cơ thủy lực
Do sự thay đổi nhỏ của sự rò rỉ bên trong động cơ, độ chính xác khoảng 10%.
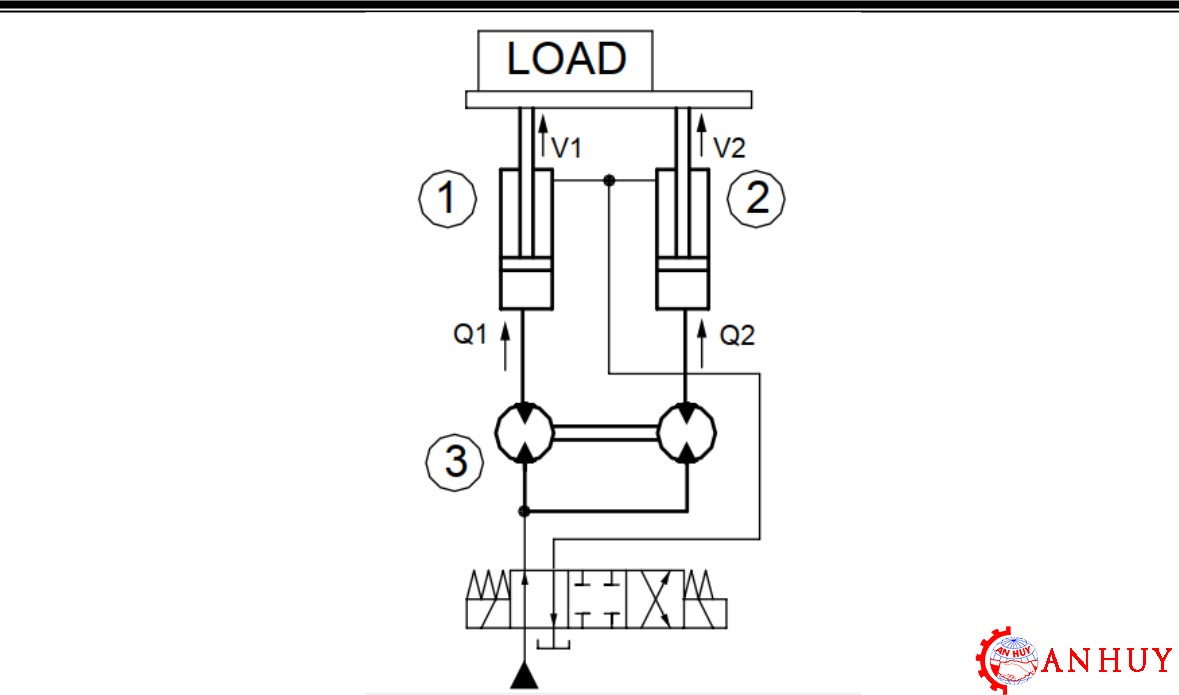
Fig. 2.31. Hydraulic circuit with rotary flow divider
Giải pháp 8 - servo control
Fig. 2.32. Closed-loop proportional control
Van điều khiển lưu lượng (3) điều khiển Q1 và, do đó, tốc độ của xy lanh
1. Trên hình. 2.32. Hệ thống điều khiển thủy lực – điện giám sát điều khiển
Q2 và, do đó, tốc độ cảu xy lanh 2 - được đồng tốc với tốc độ của xy lanh (1).
3 – Van tiết lưu
4 – Van tỉ lệ
5 – Bộ cảm biển vị trí xy lanh (1)
6 – Bộ cảm biển vị trí xy lanh (2)
Sự lắp đặt kiểu này cho phép điều khiển vô cùng chính xác tốc độ của xy lanh và vị trí vơi độ chính xác cao hơn 1%
So vơi các cách tiếp cận cơ học và thủy lực thuần túy, đồng tốc bằng điện – thủy lực cung cấp cho sự thay đổi linh hoạt. Với hệ thống vòng kín, các chiến lược điều khiển đồng tốc có thể được thiết kế dểd xỷ lý tải không đồng đều cũng như sự không chắc chắn và nhiễu loạn bên ngoài liên quan đến hệ thống thủy lực.
Công ty Cổ phần tự động hóa An Huy
Địa chỉ: 91 Đê La Thành, Đông Các, Đống Đa, Hà Nội
Điện thoại: 0977282045 – 0989257507
Email: email anhuyhydraulic@gmail.com






 Địa chỉ: 91 Đê La Thành - Ô Chợ Dừa - Đống Đa - Hà Nội
Địa chỉ: 91 Đê La Thành - Ô Chợ Dừa - Đống Đa - Hà Nội
